Nghiên cứu phương pháp học tăng cường ứng dụng cho bài toán định vị robot di động làm việc trong môi trường không xác định
Với mục đích đào tạo cho robot khả năng tự học tự thích nghi với môi trường làm việc không xác định, đề tài Nghiên cứu phương pháp học tăng cường ứng dụng cho bài toán định vị robot di động làm việc trong môi trường không xác định của nhóm sinh viên Khoa Cơ khí đã được Hội đồng nghiệm thu đánh giá cao, đạt Giải Nhất cuộc thi sinh viên Nghiên cứu khoa học lần thứ XIII.

Nguyễn Hồng Sơn và Phan Thái Học chụp ảnh cùng giảng viên hướng dẫn TS.Nguyễn Anh Tú và các bạn học tại Khoa Cơ khí
Chia sẻ về lí do chọn đề tài, bạn Nguyễn Hồng Sơn - trưởng nhóm cho biết: rất may mắn khi em là một trong những thành viên của HaIBot Lab do TS. Nguyễn Anh Tú hướng dẫn, em đã được sớm tiếp cận với robot di động và các thiết bị chất lượng cao cùng với các hướng nghiên cứu. Nhận thấy vai trò và tầm quan trọng của trí tuệ nhân tạo trong sự phát triển xã hội hiện nay, cùng với vấn đề về nghiên cứu các giải thuật thông minh đối với robot di động được giới khoa học ngày càng quan tâm, nhóm chúng em đã được thầy hướng dẫn thông qua và lên ý tưởng thực hiện đề tài.
Từ các nội dung nghiên cứu đề xuất, nhóm xác định phương pháp nghiên cứu chính là kết hợp giữa nghiên cứu lý thuyết và nghiên cứu thực nghiệm. Trong đó nghiên cứu lý thuyết cơ sở của bài toán định vị cho robot di động và phương pháp học tăng cường từ đó đề xuất giải pháp cho thực hiện đề tài. Nghiên cứu thực nghiệm nhằm đánh giá độ chính xác, tin cậy và sự ổn định của các thuật toán cũng như giải pháp về thiết bị phần cứng của đề tài
Sau thi thực hiện quá trình huấn luyện robot ở chương trình mô phỏng, nhóm nghiên cứu dùng tập giá trị đào tạo được sử dụng cho quá trình tránh vật cản của robot ở môi trường thực.
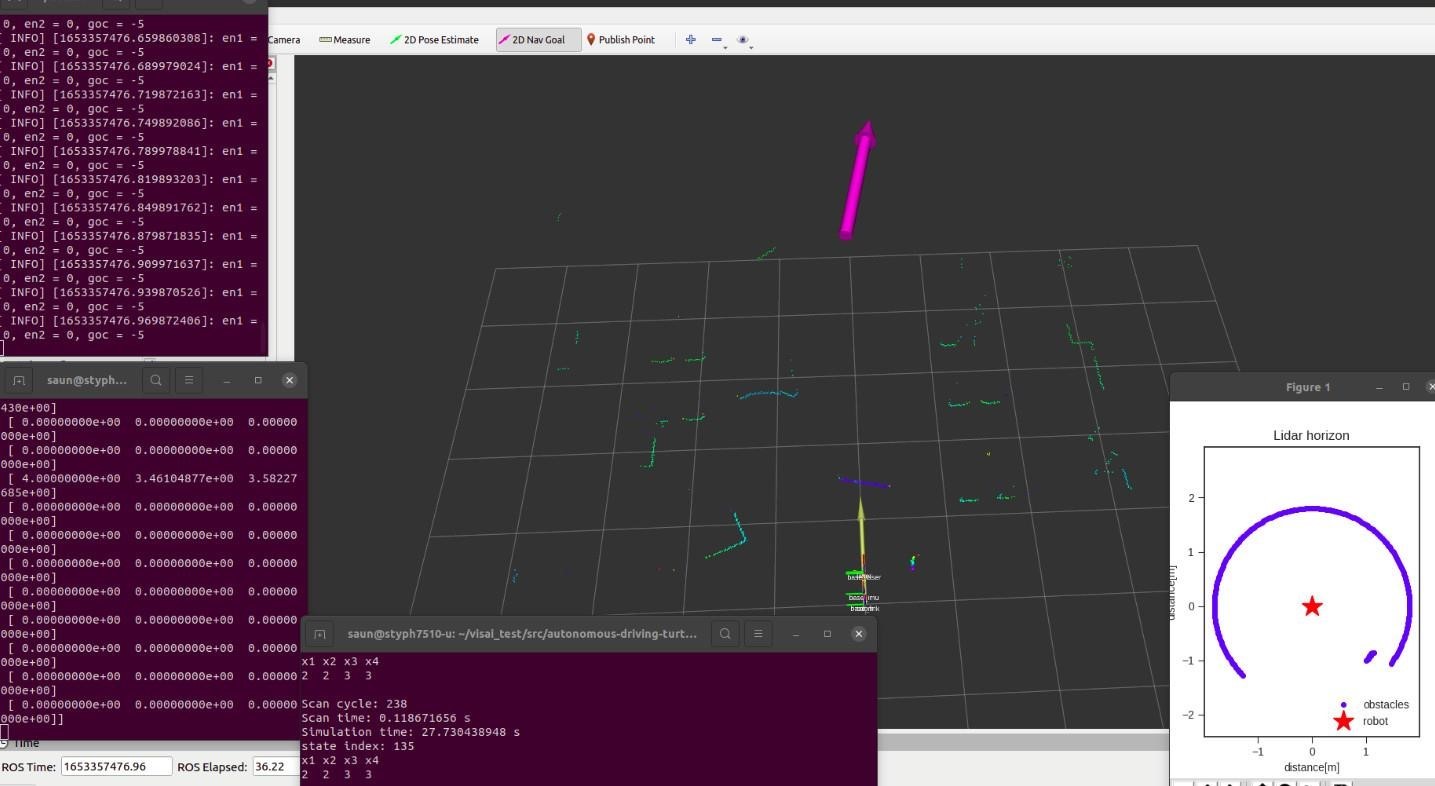 Điểm gốc khi robot bắt đầu khời động và lựa chọn điểm goal bất kì
Điểm gốc khi robot bắt đầu khời động và lựa chọn điểm goal bất kì

Điểm gốc là vị trí robot khi khởi động
Đặt goal là 1 điểm bất kì người điều khiển có để đặt ở môi trường chưa biết trước. Điểm goal được thể hiện bằng mũi tên màu tím trong hình. Điểm đến là gốc của mũi tên, hướng của robot trùng với hướng của mũi tên. Robot thực hiện quá trình di chuyển đến điểm đặt đồng thời phát hiện và tránh những chướng ngại vật trên đường đi.

Quá trình tránh vật cản của robot khi di chuyển
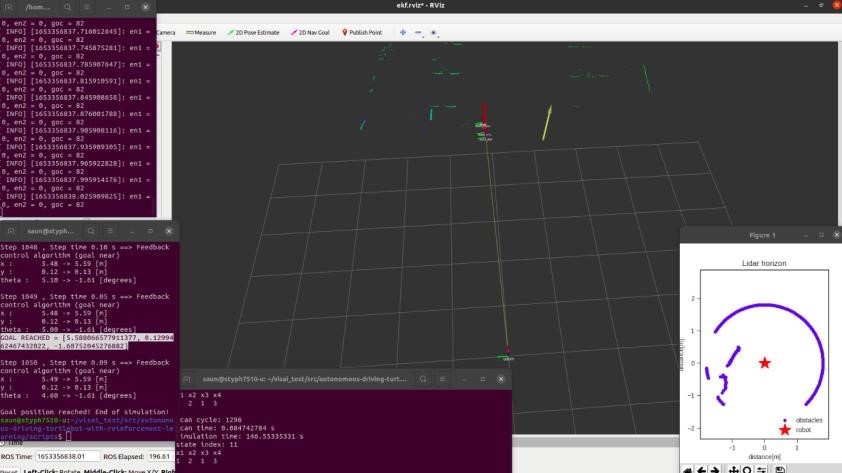
Kết quả hiển thị trên màn hình khi robot đã đi đến được điểm đích

Vị trí robot ở điểm đích khi robot kết thúc quá trình
Ở trường hợp này, sau khi thực hiện quá trình di chuyển đến điểm goal, hệ thống đã tính toán ra vị trí của điểm goal với tên hiển thị là “GOAL REACHED”
 Nhóm tiến hành đánh giá thử nghiệm
Nhóm tiến hành đánh giá thử nghiệm
Đánh giá thực nghiệm cho thấy: Hệ thống đã hoạt động ổn định, cho thời gian đáp ứng đến vị trí điểm đặt nhanh; Thực hiện được yêu cầu phát hiện và tránh các vật cản trên đường di chuyển với môi trường không xác định, robot chưa biết vị trí vật cản và không gian cũng như biên dạng của môi trường làm việc; Các sai lệch khi xác định toạ độ điểm goal chủ yếu là góc quay θ của robot; So sánh với phương pháp định vị robot truyền thống khác, phương pháp đề xuất có độ ổn định cao, thời gian đáp ứng nhanh và tích hợp thêm được tác vụ tránh vật cản khi di chuyển, robot không bị ảnh hưởng bởi các biên dạng vật cản khác nhau.
Đề tài được Hội đồng đánh giá cao, với 92,4 điểm đã xuất sắc giành Giải Nhất cuộc thi sinh viên nghiên cứu khoa học lần thứ XIII.
Video kết quả của đề tài:
Tin tiêu điểm

HaUI vươn tầm quốc tế: 5 chương trình đào tạo đạt chuẩn kiểm định ABET
Thứ Năm, 13:31 05/12/2024
Kết quả xét tuyển Đại học chính quy năm 2024
Thứ Bảy, 19:30 17/08/2024
Mức điểm điều kiện đăng ký xét tuyển đại học chính quy năm 2024 theo Phương thức 3
Thứ Năm, 16:03 18/07/2024
Đoàn cán bộ Học viện Phát triển Giáo dục nghề CHDCND Lào thăm và làm việc với Trường
Thứ Tư, 14:52 06/07/2022
Summer Festival - Bữa tiệc âm nhạc đầy sắc màu của SLT
Thứ Sáu, 23:35 24/06/2022
Đại học Công nghiệp Hà Nội: 124 năm xây dựng và phát triển
Thứ Sáu, 16:27 13/05/2022
Thông tin tuyển sinh đại học chính quy năm 2022 (Mã trường: DCN)
Thứ Sáu, 10:21 13/05/2022
Ngày hội tư vấn tuyển sinh - hướng nghiệp 2022: Trên 14.000 lượt tiếp cận thông tin tại khu vực tư vấn của HaUI
Chủ Nhật, 20:34 08/05/2022
Công ty Siemens Digital Industries Software, Vietbay và ESTEC thăm và làm việc tại Đại học Công nghiệp Hà Nội
Thứ Tư, 16:20 27/04/2022
HaUI-Foxconn hướng tới nâng tầm quan hệ đối tác
Thứ Hai, 19:40 25/04/2022
Hành trình về với những “địa chỉ đỏ” - địa danh cách mạng miền Trung
Thứ Hai, 07:30 25/04/2022
Quản trị số trong trường học: Đồng bộ dữ liệu học bạ
Thứ Hai, 09:42 18/04/2022
Đoàn cán bộ Đại học Công nghiệp Hà Nội dâng hương tại đền thờ Bác Hồ trên núi Ba Vì, Hà Nội
Thứ Năm, 17:37 14/04/2022
Bộ trưởng Nguyễn Mạnh Hùng nói về lĩnh vực thông tin và truyền thông năm 2022
Thứ Sáu, 08:18 08/04/2022
Sinh viên trở lại trường mùa loa kèn tháng tư
Thứ Ba, 17:02 05/04/2022
NCS Đặng Xuân Thao bảo vệ thành công Luận án Tiến sĩ cấp trường
Thứ Bảy, 14:00 02/04/2022
“Thanh niên Việt Nam hãy nắm lấy ngọn cờ chuyển đổi số, đưa đất nước thành quốc gia số thịnh vượng”
Thứ Tư, 16:08 30/03/2022
Ngành logistics đang đòi hỏi nguồn nhân lực lớn
Chủ Nhật, 10:11 27/03/2022
Đồng chí Nguyễn Văn Phong - Phó Bí thư Thành ủy Hà Nội kiểm tra công tác phòng chống dịch Covid-19 tại Đại học Công nghiệp Hà Nội
Thứ Sáu, 14:40 18/03/2022
Bản tin truyền hình đặc biệt: Dấu ấn Đại học Công nghiệp Hà Nội năm 2021
Thứ Ba, 07:48 25/01/2022
Tập huấn nghiệp vụ, phương án Phòng cháy chữa cháy và cứu nạn, cứu hộ năm 2021
Thứ Bảy, 16:30 18/12/2021
PGS.TS. Phạm Văn Đông - Chủ tịch công đoàn Trường phát động thi đua trong viên chức, người lao động
Thứ Tư, 16:21 01/12/2021
Hiệu trưởng nhà trường tham gia chương trình về phát triển công nghiệp hỗ trợ, phát sóng trên VTV1
Thứ Ba, 07:30 23/11/2021
Hội nghị Khoa học HaUI lần thứ V
Thứ Bảy, 14:08 30/10/2021
Phóng sự về Trung tâm Đào tạo Quốc phòng và An ninh, Đại học Công nghiệp Hà Nội
Thứ Ba, 15:29 26/10/2021
Thông điệp của Hiệu trưởng nhân dịp năm học mới 2021-2022
Thứ Ba, 07:30 12/10/2021
Phát triển thuật toán cải tiến robot phục hồi chức năng cho người đột quỵ
Thứ Ba, 20:17 28/09/2021
Hướng dẫn nhập học trực tuyến năm 2021
Thứ Năm, 13:34 16/09/2021
Giới thiệu cơ sở đào tạo Hà Nam, trường Đại học Công nghiệp Hà Nội
Thứ Tư, 11:00 15/09/2021
Giáo dục đại học năm học mới: Tăng cường thích nghi, tiếp tục lộ trình đổi mới
Thứ Ba, 16:15 24/08/2021
Đại học Công nghiệp Hà Nội công bố mức điểm nhận hồ sơ xét tuyển năm 2021
Thứ Sáu, 17:43 13/08/2021
Ứng dụng phát hiện gian lận thi cử của sinh viên Đại học Công nghiệp Hà Nội được truyền thông chú ý
Thứ Tư, 09:29 28/07/2021
Đại học Công nghiệp Hà Nội không tăng học phí và có nhiều chính sách hỗ trợ học phí, học bổng cho sinh viên
Thứ Tư, 07:44 28/07/2021
Điểm chuẩn vào Đại học Công nghiệp Hà Nội trong 2 năm qua
Thứ Ba, 22:17 27/07/2021
Tăng tốc tư vấn, hướng nghiệp: Đa dạng hình thức
Thứ Ba, 07:36 20/07/2021
Làm chủ công nghệ sản xuất bánh răng côn xoắn thay thế sản phẩm nhập khẩu
Thứ Sáu, 07:30 09/07/2021
Làm rõ cơ chế tài chính cho cơ sở giáo dục đại học thực hiện tự chủ
Thứ Ba, 14:22 22/06/2021
ĐH Công nghiệp Hà Nội chuyển đổi số đáp ứng nhu cầu nhân lực CMCN 4.0
Thứ Tư, 08:02 02/06/2021
Các trường thuộc Bộ Công Thương: Tăng lợi thế, uy tín đào tạo nhờ chuyển đổi số
Thứ Ba, 09:05 01/06/2021
Đại học Công nghiệp Hà Nội tổ chức bảo vệ luận văn thạc sĩ trực tuyến cho học viên nước CHDCND Lào
Thứ Sáu, 18:43 21/05/2021
Phân tích dữ liệu kinh doanh và tương lai của ngành trong kỷ nguyên số
Thứ Ba, 11:21 18/05/2021
Chế tạo thành công thiết bị phục vụ công tác đào tạo ngành công nghệ kỹ thuật ô tô
Thứ Ba, 12:38 11/05/2021
Các mốc thời gian tuyển sinh đại học chính quy năm 2021
Thứ Năm, 14:45 06/05/2021![[Livestream] Hiểu đúng ngành, chọn đúng nghề - Tư vấn chuyên sâu về nhóm ngành Điện, Điện tử, Công nghệ thông tin](https://www.haui.edu.vn/media/81/t81798.jpg)
[Livestream] Hiểu đúng ngành, chọn đúng nghề - Tư vấn chuyên sâu về nhóm ngành Điện, Điện tử, Công nghệ thông tin
Thứ Tư, 16:20 05/05/2021![[Livestream] Hiểu đúng ngành, chọn đúng nghề - Tư vấn chuyên sâu về nhóm ngành CN May & Thiết kế thời trang](https://www.haui.edu.vn/media/81/t81772.jpg)
[Livestream] Hiểu đúng ngành, chọn đúng nghề - Tư vấn chuyên sâu về nhóm ngành CN May & Thiết kế thời trang
Thứ Ba, 16:25 04/05/2021![[Livestream] Hiểu đúng ngành, chọn đúng nghề - Tư vấn chuyên sâu về nhóm ngành Kinh tế, Tài chính, Quản trị](https://www.haui.edu.vn/media/81/t81739.jpg)
[Livestream] Hiểu đúng ngành, chọn đúng nghề - Tư vấn chuyên sâu về nhóm ngành Kinh tế, Tài chính, Quản trị
Thứ Ba, 17:10 27/04/2021![[Livestream] Hiểu đúng ngành, chọn đúng nghề - Tư vấn chuyên sâu về nhóm ngành Công nghệ Hóa, Thực phẩm, Môi trường](https://www.haui.edu.vn/media/81/t81738.jpg)
[Livestream] Hiểu đúng ngành, chọn đúng nghề - Tư vấn chuyên sâu về nhóm ngành Công nghệ Hóa, Thực phẩm, Môi trường
Thứ Hai, 16:30 26/04/2021![[Livestream] Hiểu đúng ngành, chọn đúng nghề - Tư vấn chuyên sâu về nhóm ngành Ngôn ngữ, Du lịch và Văn hóa](https://www.haui.edu.vn/media/81/t81737.jpg)
[Livestream] Hiểu đúng ngành, chọn đúng nghề - Tư vấn chuyên sâu về nhóm ngành Ngôn ngữ, Du lịch và Văn hóa
Thứ Bảy, 16:30 24/04/2021![[Livestream] Hiểu đúng ngành, chọn đúng nghề - Tư vấn chuyên sâu về nhóm ngành Cơ khí, Công nghệ Ô tô](https://www.haui.edu.vn/media/81/t81719.jpg)
[Livestream] Hiểu đúng ngành, chọn đúng nghề - Tư vấn chuyên sâu về nhóm ngành Cơ khí, Công nghệ Ô tô
Thứ Sáu, 16:30 23/04/2021![[Livestream] Tuyển sinh năm 2021 - Những điều cần biết](https://www.haui.edu.vn/media/81/t81711.jpg)
[Livestream] Tuyển sinh năm 2021 - Những điều cần biết
Thứ Năm, 17:00 22/04/2021